Prekių nėra
(Kainos su PVM)
") Padidinti
Padidinti ")
Tik internetu
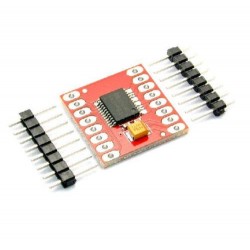
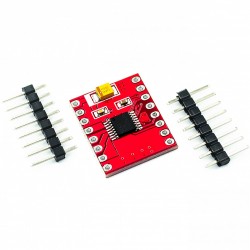
TB6612FNG (2x H-bridge su stabdymu)
d0596
Nauja prekė
H bridge paskirtis yra valdyti didesnės srovės kryptį (pvz. variklio sukimosi kryptį). Gali valdyti 2 DC variklius.
Prekių kiekis mūsų sandėlyje: 40
Charakteristikos
| Suderinama su Arduino™ ir *duino | Taip |
| Kanalų skaičius | 2 |
| Maksimali valdoma srovė | 1,2A |
| Maksimali valdoma įtampa | 15 VDC |
| Nominali darbinė įtampa | 5V |
| Maitinimo įtampa | 3-5V (DC) |
| Maksimali maitinimo įtampa | 5,5V |
| Kontaktų kiekis | 24 |
| Matmenys | SSOP24 |
| Maksimali srovė | 3,2A |
| Naudojami mikrovaldiklio prievadai | iki 7 skaitmeninių I/O |
| Pagrindinės funkcijos grandynas | TB6612FNG |
Apie prekę
The TB6612FNG motor driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes - CW, CCW, short-brake, and stop. The two motor outputs (A and B) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Logic supply voltage (VCC) can be in the range of 2.7-5.5VDC, while the motor supply (VM) is limited to a maximum voltage of 15VDC. The output current is rated up to 1.2A per channel (or up to 3.2A for a short, single pulse).
Features:
- Power supply voltage: VM=15V max, VCC=2.7-5.5V
- Output current: Iout=1.2A(average) / 3.2A (peak)
- Standby control to save power
- CW/CCW/short brake/stop motor control modes
- Built-in thermal shutdown circuit and low voltage detecting circuit
//motor A connected between A01 and A02 //motor B connected between B01 and B02 int STBY = 10; //standby //Motor A int PWMA = 3; //Speed control int AIN1 = 9; //Direction int AIN2 = 8; //Direction //Motor B int PWMB = 5; //Speed control int BIN1 = 11; //Direction int BIN2 = 12; //Direction void setup(){ pinMode(STBY, OUTPUT); pinMode(PWMA, OUTPUT); pinMode(AIN1, OUTPUT); pinMode(AIN2, OUTPUT); pinMode(PWMB, OUTPUT); pinMode(BIN1, OUTPUT); pinMode(BIN2, OUTPUT); } void loop(){ move(1, 255, 1); //motor 1, full speed, left move(2, 255, 1); //motor 2, full speed, left delay(1000); //go for 1 second stop(); //stop delay(250); //hold for 250ms until move again move(1, 128, 0); //motor 1, half speed, right move(2, 128, 0); //motor 2, half speed, right delay(1000); stop(); delay(250); } void move(int motor, int speed, int direction){ //Move specific motor at speed and direction //motor: 0 for B 1 for A //speed: 0 is off, and 255 is full speed //direction: 0 clockwise, 1 counter-clockwise digitalWrite(STBY, HIGH); //disable standby boolean inPin1 = LOW; boolean inPin2 = HIGH; if(direction == 1){ inPin1 = HIGH; inPin2 = LOW; } if(motor == 1){ digitalWrite(AIN1, inPin1); digitalWrite(AIN2, inPin2); analogWrite(PWMA, speed); }else{ digitalWrite(BIN1, inPin1); digitalWrite(BIN2, inPin2); analogWrite(PWMB, speed); } } void stop(){ //enable standby digitalWrite(STBY, LOW); }
Atsiliepimai
Šiuo metu klientų atsiliepimų nėra.
Priedai
Termo pasta (0.5g)
0,59€11 x 11 mm aušintuvas
0,58€50W rezistorius 2R0
2,87€50W rezistorius 1R0
2,87€













30 kitos prekės toje pačioje kategorijoje:
-
Variklių valdymo modulis su TB6612FNG (2x H-bridge su stabdymu)
8,47€
-

Variklių valdymo modulis (2x H-bridge) su L9110S
2,96€
-

Variklių valdymo mikroschema L293D (2xH-bridge)
1,90€
-

Variklių valdymo shield'as Fundumoto (2x H-bridge) su L298P su buzzer
13,92€
-

Variklių valdymo modulis IMS-2B (1x H-bridge) su MOSFET
47,37€
-

Variklių valdymo modulis IBT_2 (1x H-bridge) su BTS7960
17,30€
-

Trijų ašių CNC išplėtimo plokštė Nano valdikliui
9,62€
-

11 x 11 mm aušintuvas
0,58€
-

Aušintuvas 4020 12VDC
2,42€
-

Aušintuvas 5010 12VDC
1,69€
-

Aušintuvas 5010 5VDC
1,69€
-

Aušintuvas 6015 12VDC
2,54€
-

Aušintuvas 6015 5VDC
2,54€
-

Aušintuvas 6015 24VDC
2,54€
-

Aušintuvas 3010 12VDC
1,51€
-

WeMos D1 mini 2x H-bridge variklių valdymo plokštė I2C su TB6612FNG
8,83€
-

Variklių valdymo shield'as Nano-L298P (2x H-bridge)
12,95€
-

Aušintuvas 6010 24VDC
3,00€
-

Aušintuvas SSR relėms tvirtinamas prie DIN bėgelio
4,82€
-

Robotų valdymo plokštė RosBot (Raspberry Pi kompiuteriams)
38,72€
-

Aušintuvas 4007 12VDC
2,54€
-

Dvikryptis variklio greičio reguliatorius 6-24V 3A
7,99€
-
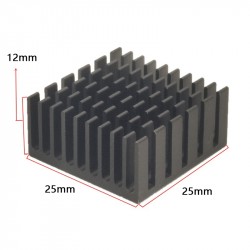
25 x 25 x 12 mm aušintuvas
0,97€
-
Variklių valdymo modulis su DRV8833 (2x H-bridge su stabdymu)
2,42€
-

40 x 35 x 14 mm aušintuvas
1,94€
-

22 x 22 x 30 mm aušintuvas
1,69€
-
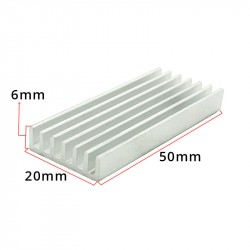
50 x 20 x 6 mm aušintuvas
0,97€
-
100 x 40 x 20 mm aušintuvas
7,33€
-

Turbinos tipo aušintuvas 5015 12VDC
3,63€
-

40 x 20 x 6 mm aušintuvas
1,21€