Prekių nėra
(Kainos su PVM)
") Padidinti
Padidinti ")
")
Tik internetu
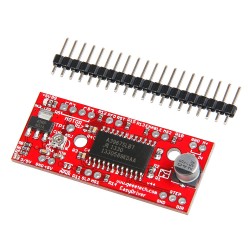
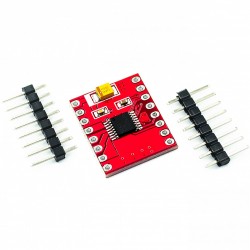
Variklių valdymo modulis su TB6612FNG (2x H-bridge su stabdymu)
d0439
Nauja prekė
Šis Arduino modulis yra skirtas Arduino implementacijoms, kur reikalinga ne tik valdyti didesnės galios elektroniką, bet ir valdyti srovės kryptį (pvz. variklio sukimosi kryptį). Gali valdyti 2 DC variklius.
Prekių kiekis mūsų sandėlyje: 102
Charakteristikos
| Suderinama su Arduino™ ir *duino | Taip |
| Kanalų skaičius | 2 |
| Maksimali valdoma srovė | 1,2A |
| Maksimali valdoma įtampa | 15 VDC |
| Nominali darbinė įtampa | 5V |
| Maitinimo įtampa | 3-5V (DC) |
| Maksimali maitinimo įtampa | 5,5V |
| Jungties žingsnis | 2,54mm |
| Jungties tipas | Male (vyr.) |
| Kontaktų kiekis | 16 |
| Maksimali srovė | 3,2A |
| Naudojami mikrovaldiklio prievadai | iki 7 skaitmeninių I/O |
| Pagrindinės funkcijos grandynas | TB6612FNG |
Apie prekę
The TB6612FNG motor driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes - CW, CCW, short-brake, and stop. The two motor outputs (A and B) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Logic supply voltage (VCC) can be in the range of 2.7-5.5VDC, while the motor supply (VM) is limited to a maximum voltage of 15VDC. The output current is rated up to 1.2A per channel (or up to 3.2A for a short, single pulse).
Board comes with all components installed as shown. Decoupling capacitors are included on both supply lines. All pins of the TB6612FNG are broken out to two 0.1" pitch headers; the pins are arranged such that input pins are on one side and output pins are on the other.
Features:
- Power supply voltage: VM=15V max, VCC=2.7-5.5V
- Output current: Iout=1.2A(average) / 3.2A (peak)
- Standby control to save power
- CW/CCW/short brake/stop motor control modes
- Built-in thermal shutdown circuit and low voltage detecting circuit
- All pins of the TB6612FNG broken out to 0.1" spaced pins
- Filtering capacitors on both supply lines
//motor A connected between A01 and A02 //motor B connected between B01 and B02 int STBY = 10; //standby //Motor A int PWMA = 3; //Speed control int AIN1 = 9; //Direction int AIN2 = 8; //Direction //Motor B int PWMB = 5; //Speed control int BIN1 = 11; //Direction int BIN2 = 12; //Direction void setup(){ pinMode(STBY, OUTPUT); pinMode(PWMA, OUTPUT); pinMode(AIN1, OUTPUT); pinMode(AIN2, OUTPUT); pinMode(PWMB, OUTPUT); pinMode(BIN1, OUTPUT); pinMode(BIN2, OUTPUT); } void loop(){ move(1, 255, 1); //motor 1, full speed, left move(2, 255, 1); //motor 2, full speed, left delay(1000); //go for 1 second stop(); //stop delay(250); //hold for 250ms until move again move(1, 128, 0); //motor 1, half speed, right move(2, 128, 0); //motor 2, half speed, right delay(1000); stop(); delay(250); } void move(int motor, int speed, int direction){ //Move specific motor at speed and direction //motor: 0 for B 1 for A //speed: 0 is off, and 255 is full speed //direction: 0 clockwise, 1 counter-clockwise digitalWrite(STBY, HIGH); //disable standby boolean inPin1 = LOW; boolean inPin2 = HIGH; if(direction == 1){ inPin1 = HIGH; inPin2 = LOW; } if(motor == 1){ digitalWrite(AIN1, inPin1); digitalWrite(AIN2, inPin2); analogWrite(PWMA, speed); }else{ digitalWrite(BIN1, inPin1); digitalWrite(BIN2, inPin2); analogWrite(PWMB, speed); } } void stop(){ //enable standby digitalWrite(STBY, LOW); }
Atsiliepimai
Šiuo metu klientų atsiliepimų nėra.
Priedai
Termo pasta (0.5g)
0,59€11 x 11 mm aušintuvas
0,58€50W rezistorius 2R0
2,87€50W rezistorius 1R0
2,87€














30 kitos prekės toje pačioje kategorijoje:
-

Variklių valdymo modulis (2x H-bridge) su L9110S
2,96€
-

Variklių valdymo mikroschema L293D (2xH-bridge)
1,90€
-

Variklių valdymo shield'as Fundumoto (2x H-bridge) su L298P su buzzer
13,92€
-

Variklių valdymo modulis IMS-2B (1x H-bridge) su MOSFET
47,37€
-

Variklių valdymo modulis IBT_2 (1x H-bridge) su BTS7960
17,30€
-
TB6612FNG (2x H-bridge su stabdymu)
4,84€
-

Trijų ašių CNC išplėtimo plokštė Nano valdikliui
9,62€
-

11 x 11 mm aušintuvas
0,58€
-

Aušintuvas 4020 12VDC
2,42€
-

Aušintuvas 5010 12VDC
1,69€
-

Aušintuvas 5010 5VDC
1,69€
-

Aušintuvas 6015 12VDC
2,54€
-

Aušintuvas 6015 5VDC
2,54€
-

Aušintuvas 6015 24VDC
2,54€
-

Aušintuvas 3010 12VDC
1,51€
-

WeMos D1 mini 2x H-bridge variklių valdymo plokštė I2C su TB6612FNG
8,83€
-

Variklių valdymo shield'as Nano-L298P (2x H-bridge)
12,95€
-

Aušintuvas 6010 24VDC
3,00€
-

Aušintuvas SSR relėms tvirtinamas prie DIN bėgelio
4,82€
-

Robotų valdymo plokštė RosBot (Raspberry Pi kompiuteriams)
38,72€
-

Aušintuvas 4007 12VDC
2,54€
-

Dvikryptis variklio greičio reguliatorius 6-24V 3A
7,99€
-
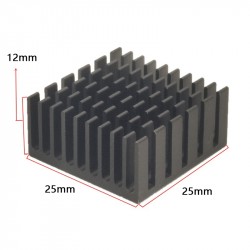
25 x 25 x 12 mm aušintuvas
0,97€
-
Variklių valdymo modulis su DRV8833 (2x H-bridge su stabdymu)
2,42€
-

40 x 35 x 14 mm aušintuvas
1,94€
-

22 x 22 x 30 mm aušintuvas
1,69€
-
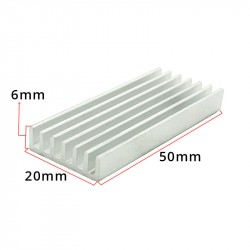
50 x 20 x 6 mm aušintuvas
0,97€
-
100 x 40 x 20 mm aušintuvas
7,33€
-

Turbinos tipo aušintuvas 5015 12VDC
3,63€
-

40 x 20 x 6 mm aušintuvas
1,21€